



混合式步进电机是归纳了永磁式和反应式的长处而规划的步进电机。它又分为两相、三相和五相,两相
步进角一般为1.8度 ,三相步进角 一 般为 1.2度 ,而五相步进角 一 般为0.72度。
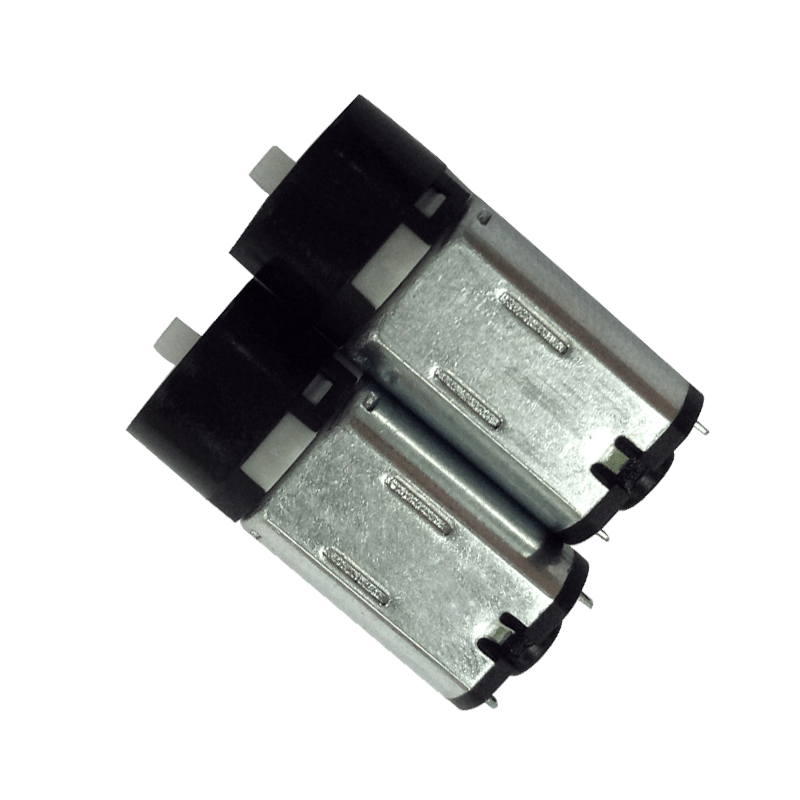
混合式步进电机的转子本身具有磁性,因此在相同的定子电流下发生的转矩要大于反应式步进电机,且
其步距角通常也较小,因此,经济型数控机床一般需用混合式步进电机驱动。但混合转子的结构较复杂、
转子惯量大,其快速性要低于反应式步进电机。
步进电机的原始模型起源于1830年至1860年间世纪年代后期,随着永磁资料和半导体技术的发展,步进
电机很快的发展并成熟起来。20世纪60年代后期我国开端研讨和制造步进电机。从那时到60年代末,主
要是高校和科研院所为研讨一些设备而开发的少量产品。70年代初开端,出产和研讨才有所突破。
70年代中期至80年代中期进入发展阶段,各种高性能产品不断被开发出来。80年代中期今后,由于对
混合式步进电机的开发和研发,我国混合式步进电机的技术,包含本体技术和驱动技术在内,都逐步接近
国外产业的水平,各种混合式步进电机及其驱动器的产品应用逐步多起来。

混合式步进电机的长处:
混合式步进电机分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进
电机跟着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的使用最为广泛。
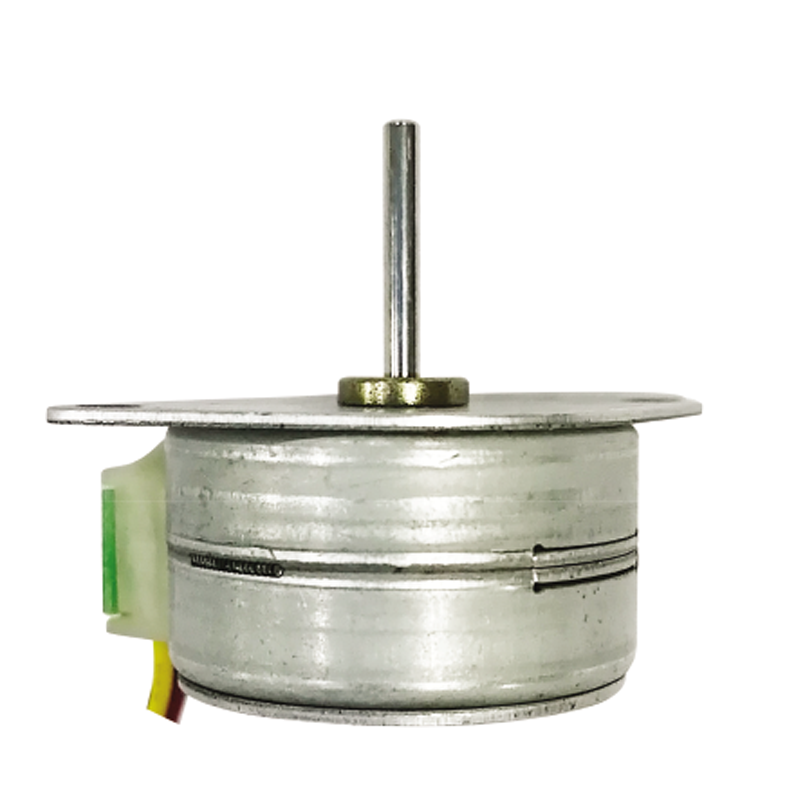
混合式步进电机归纳了反应式和永磁式步进电机两者的长处:极对数等于转子齿数,可以根据需要在很大
范围内变化;绕组电感随转子方位变化较小,易于完成最佳运行控制;轴向充磁磁路,使用高磁能积的新型
永磁资料,有利于电机功能的提高;转子磁钢供给励磁;在整个运行区域没有显着的振荡。


 在线咨询
在线咨询 


